《汽车工程》2026年第3期发表了吉林大学汽车底盘集成与仿生全国重点实验室等机构联合研究成果"匝道汇入场景下基于交互场模型的驾驶员交互行为研究"一文。针对目前自动驾驶协同决策仅考虑安全、舒适等约束条件而忽略人类社会性驾驶行为所带来的机理分析不清、缺乏精准建模的问题,文章基于对复杂冲突场景下驾驶员自然驾驶行为的分析,结合驾驶员预瞄理论提出了具有方向、形状和强度的驾驶员交互场模型,将驾驶员交互行为的定性描述转化为对交互场中冲突计算的定量分析,也一同揭示了驾驶员的社会性动态交互演变机理。
一、研究背景
自动驾驶技术的研发不仅需要考虑安全性、舒适性等传统指标,更需要考虑本车在新型复杂混合交通流中的社会性交互行为。匝道是城市道路交通建设中的主要结构之一,在由匝道向主道汇入期间,充分体现了驾驶员之间的交互行为。然而,传统车辆相对运动模型与刚体碰撞模型缺少对驾驶员自身驾驶行为中“利己性”与“利他性”等社会属性的考虑,在描述车辆汇入过程中无法判断场景中是否发生了交互;同时,基于规则的决策方法在处理与他车的动态交互过程中也未能合理地揭示人类驾驶员之间的社会性动态交互演变规律。因此,如何将驾驶员交互行为的定性描述转化为对交互场中冲突计算的定量分析成为该研究的关键。
二、研究内容
1. 构建交通流高阶网络模型:将交通流建模为高阶网络,并将其作为解释驾驶员间交互行为的框架,从而提供驾驶交互及其强度的数学定义。

图1 技术路线图
2. 构建驾驶员交互场模型:驾驶员对他车产生的影响与其驾驶意图密切相关,将这种影响建模为驾驶员交互场模型,并从方向、形状和强度三方面进行了描述:
(1)方向:交互场表征了驾驶员的驾驶意图,其方向即驾驶员的预定驾驶方向。
(2)形状:相关研究表明,人类对周围环境的影响并非对称的,前方影响较强,后方影响较弱,同时考虑到人类的视野呈扇形,因此交互场的形状定义为梯形,而不是以往研究中常用的对称圆形。
(3)强度:交互场内每一点的值即强度,代表驾驶员对该点的影响。类似于人类在静止时的交互行为,驾驶员对周围某点的影响显然与相对距离和角度有关此外,作为动态场景,速度也是理解驾驶行为的重要指标,不同车辆速度对驾驶行为的影响不同。
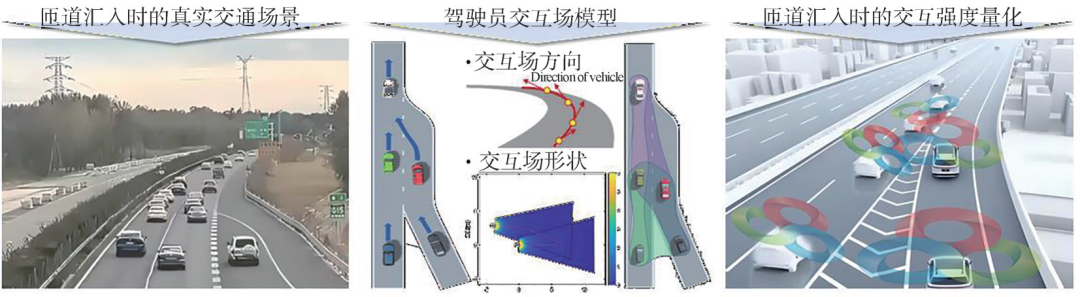
图2 匝道汇入的现实场景与交互模型示意图

图3 驾驶员交互场模型示意图
三、研究结果
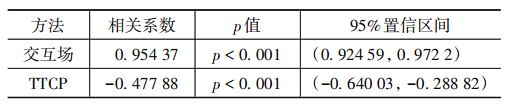
1. 交互场量化结果的有效性验证:交互场量化结果与人类判断的相关性很强,显著高于TTCP。为进一步阐明交互场对驾驶员间交互行为的量化结果,绘制了交互强度曲线,并将关键时刻的驾驶场景可视化。
表1 相关性分析结果
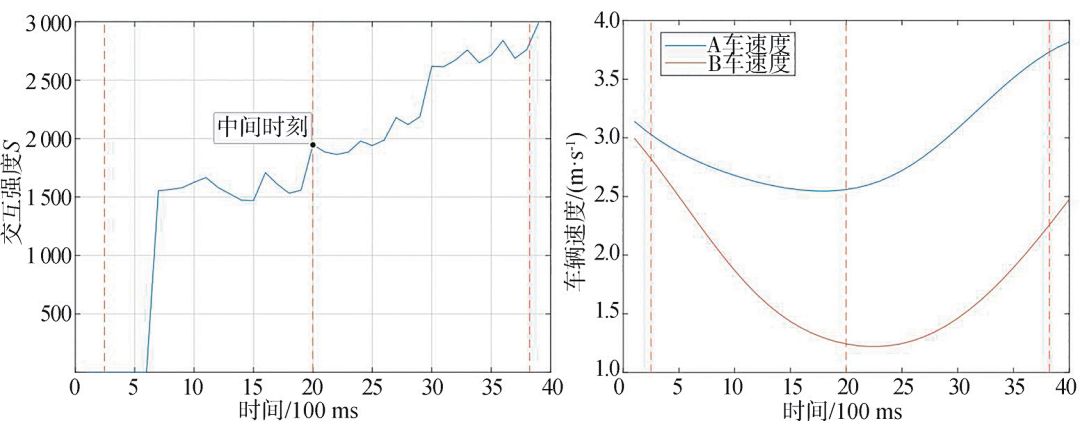
(a)交互强度曲线 (b)两车速度曲线
图4 交互行为量化结果

图5 关键时刻驾驶场景可视化
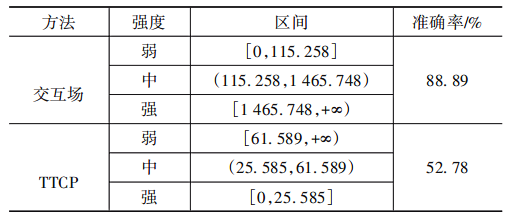
2. 准确性分析:基于交互场的分类准确率最高,优于TTCP。研究表明,交互场计算的交互强度数值能够有效反映人类对交互强度的认知并具有实际意义。
表2 准确性分析结果
四、创新点与意义
不同于以往研究大多在典型工况下基于规则与既定逻辑人为设计安全舒适等指标约束条件的方法,该文深入分析千差万别的驾驶员在复杂交通流中的社会性驾驶行为特征,探究人类驾驶员之间的社会性动态交互演变规律,将驾驶员交互行为的定性描述转化为对交互场中冲突计算的定量分析,旨在使自动驾驶技术能够像人类驾驶员一样从容应对突发场景并处理好与他车的动态交互。文章所提出的交互场模型及交互强度量化方法,可为动态调控匝道汇入流量提供理论基础,对提升智能交通系统效能和规范“人机混驾”交通伦理具有启示作用,未来可使自动驾驶汽车更和谐、融洽地融入到新型复杂混合交通流中,也为自动驾驶汽车的协同决策提供理论方法与技术支撑。